Elektronik
Die Shapeoko2 wird über ein Arduino gesteuert. Um die Motoren zu treiben verwendet der Bausatz ein Shield (hier die Version 1.01 abgebildet), welches vier Pololu A4988 Schrittmotortreiber trägt, welche die vier Motoren ansteuern.
Das Shield kommt ungelötet, da das Zusammenlöten keine große Herausforderung darstellt und die industrielle Fertigung sehr teuer kommen würde. Im fertig gelöteten Zustand sieht das Shield dann folgendermaßen aus:

Die Abbildung zeigt auch die Position der Jumper, die die Schrittweiten der jeweiligen Motoren festlegt.
Die Schittmotortreiber werden in die Header eingesetzt, wobei man die Orientierung beachten muss!

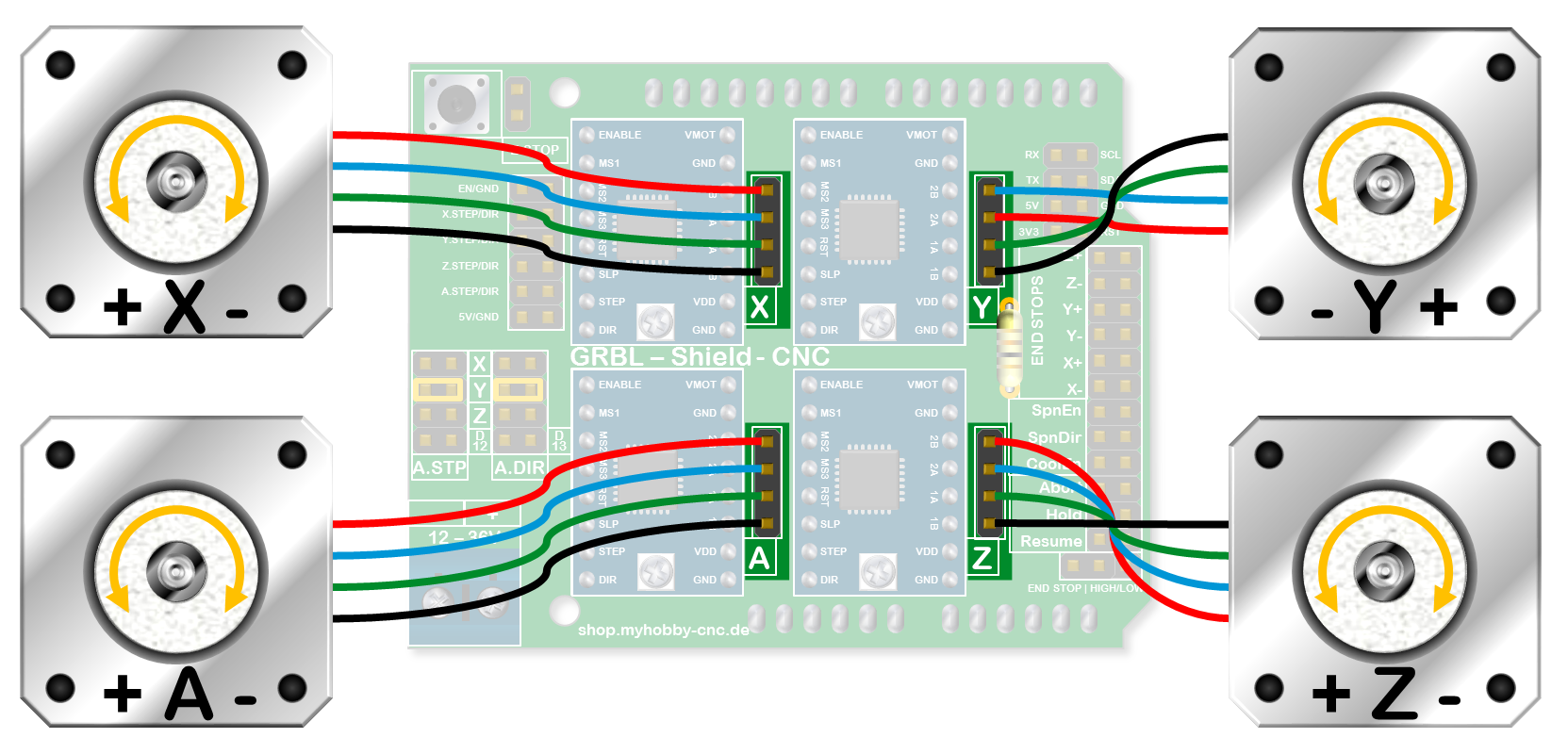
An die mit X, Y, A und Z gekennzeichneten 4-poligen Stiftreihen werden dann die Motoren angeschlossen. Dazu schneidet man das 5 Meter lange 4-adrige Kabel in vier gleich lange Stücke und isoliert die vier Adern etwa 8 mm ab. Der Bausatz sieht vor, diese an kleine 4-polige Buchsenleisten anzulöten. Ich habe mich entschieden, diese an sogenannte Jumperkabel anzuschließen, welche man als Arduino-Nutzer zur genüge haben sollte. Dazu schneide ich vier dieser Kabel in der Mitte durch und löte sie an die Adern des Motorkabels. Die Lötstelle versiegele ich mit einem kleinen Schrumpfschlauch:

Dieser Anschluss ermöglicht es mir, die Motorverbindung sehr flexibel umzustecken, sollte ich die Motoren falsch angeschlossen haben.
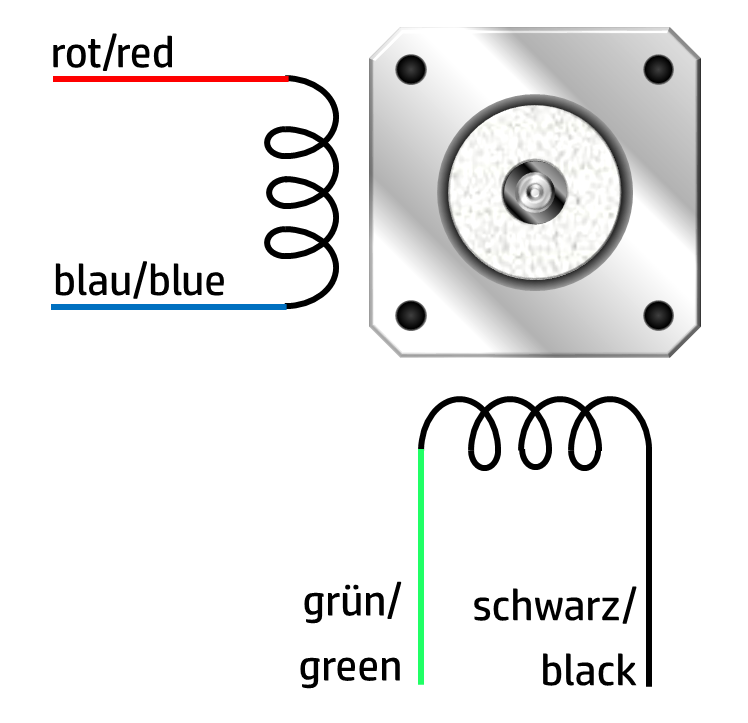
Das andere Ende des Motorkabels schließe ich an die Lüsterklemmen an, mit denen ich die Kabel der Motoren verbinde. Die bei mir gelieferten Motoren sind vom Typ 42BYGHW811. Die Kabelpaare der Spulen sind dabei Rot-Blau und Schwarz-Grün. Andere Motoren können eine andere Farbcodierung haben. Dann muss man mit einem Durchgangsprüfer die jeweiligen Paare identifizieren, da die Spule einem Gleichstrom so gut wie keinen Widerstand entgegen stellt. Hier noch eine graphische Darstellung der Spulen:
Wenn alle Motoren angeschlossen sind, kann man die Funktionen testen. Dazu muss noch das mitgelieferte Netzteil über die entsprechende Buchse und Kabel an das Shield angeschlossen werden. Ersatzweise kann man auch ein Labornetzgerät verwenden.
Die vier Motoren werden alle gleich angeschlossen, bis auf einen Motor der Y-Achse, bei dem eine Spule verdreht angeschlossen wird, damit er in die andere Richtung dreht. Dies ist wichtig für die Y-Achse, deren beiden Moteoren sich ja gegenüber stehen und darum in entgegengesetzte Richtungen laufen müssen! (In der Abbildung sind die Anschlüsse Y und A für die Y-Achsen.)
Software
Als Software verwende ich den Universal G-Code Sender (UGS) in der Version 1.0.6. Dieser kann hier direkt geladen werden, oftmals führen die Links auf die sehr veraltete Version 1.0.4.
Die Software verfügt über eine manuelle Steuerung, mit der man jetzt die Schrittmotoren testen kann:

Man kann auch eine Testdatei vom Github Repository laden und sich über den Visualizer anzeigen lassen. So bekommt man schon einen Vorgeschmack auf die fertige Fräse…

