Inhaltsverzeichnis
Inbetriebnahme und Fehlersuche
Terminal Programm
Um unabhängig von speziellen CNC Programmen zu sein, kann zur Inbetriebnahme ein Terminal Programm wie z.B. TeraTerm verwendet werden:
Das GRBL Controller Board noch ohne Treiber und ohne angeschlossenes Netzteil über USB mit dem PC verbinden und über den Windows Gerätemanager den neuen COM Port identifizieren (im Beispiel ist es COM4), ggf muss der passende CH340 Treiber vorher installiert werden.

In Tera Term den seriellen Port auswählen und konfigurieren:


Ab GRBL 0.9f wird 115200 als Baudrate verwendet, davor 9600.
Dann die Terminal Einstellungen konfigurieren:

Drückt man jetzt die Reset Taste auf dem Board, sollte die GRBL Startmeldung erscheinen:

Erscheint die GRBL Startmeldung nicht, hat der Arduino ev. noch nicht die GRBL-Firmware geladen. Dass muss dann noch nachgeholt werden (GRBL-Controller mit neuer Firmware programmieren).
Jetzt wird USB wieder getrennt und das Netzteil (meistens 24V) angeschlossen. Die grüne LED sollte nun leuchten und die Stromaufnahme sollte bei ca. 3 mA liegen. Passt das, wird wieder USB angesteckt und die GRBL Startmeldung sollte im Terminal erscheinen.
Erscheint die Startmeldung nicht, so ist nach Lötfehlern und Lötbrücken zu suchen.
Motortreiber
Nun werden nacheinander die Motortreiber in Betrieb genommen. Hier ist unbedingt auf die richtige Steckrichtung zu achen! Ein verdrehtes Aufstecken der Module kann diese und das Prozessorboard sofort unwiederbringlich zerstören!
Im folgenden Bild sind die beiden von uns vertriebenen Module, aufgesteckt auf ein GRBL-Shield, abgebildet. Links das DRV8825 (hier ohne Kühlkörper) mit einem Chip von Texas Instruments, und rechts das A4988 mit einem Chip von Allegro.

Dasselbe hier nochmal auf unserem eigenen GRBL-Controller-Board. Übrigens beim GRBL-NANO-Board ist die Aufsteckrichtung identisch zum GRBL-Controller-Board.

Die drei Chips unterscheiden sich im Wesentlichen nur in Ihrer Leistung und im Microstepping. Der DRV Chip verträgt eine etwas höhere Leistung 2A statt 1.5A beim A4988 und besitzt ein Microstepping bis 1/32 statt 1/16 beim A4988. Der neu Toshiba 67S109 Chip (weiß) ist bis zu 4A Spitze ausgelegt. Der Betrieb ist aber immer nur mit dem großen Kühlkörper zu empfehlen. Ansonsten sind die Bausteine aber durch Ihren Trägerplatine mit POLOLU-Formfaktor identisch.
Kühlkörper
Für höhere Motorströme wie z.B. beim NEMA23 sind unbedingt möglichst große Kühlkörper zu montieren!
Wenn Kühlkörper montiert werden, sollte dazu Sekundenkleber oder Wärmeleitkleber verwendet werden. Wärmeleitpaste ist nicht geeignet da dann der Kühlkörper später verrutschen kann, was zu Kurzschlüssen führen kann. Bei der Montage ist darauf zu achten dass der Kühlkörper keinen Kontakt zu den Beinchen oder Bauteilen der Treiber hat! Die Beinchen können ggf. mit einem Elektronik-Seitenschneider gekürzt werden.

Kurzschlussgefahr zwischen überstehenden Beinchen der Treiber und Kühlkörper.
Microstepping
Als nächstes wird kontrolliert ob die Jumper für das Microstepping korrekt gesetzt sind.
- Für riemengetriebene Achsen ist die Standardeinstellung 1/8 Schritte
- Für gewindegetriebene Achsen ist die Standardeinstellung 1/2 Schritte (Halbschritte)
Zum Einstellen können die folgenden Tabellen benutzt werden:
High = Jumper gesteckt
Low = Jumper offen
Pololu A4988 Stepper Driver Konfiguration:
| MS1 | MS2 | MS3 | Microstep Resolution |
|---|---|---|---|
| Low | Low | Low | Full step |
| High | Low | Low | Half step |
| Low | High | Low | 1/4 step |
| High | High | Low | 1/8 step |
| High | High | High | 1/16 step |

Pololu DRV8825 Stepper Driver Konfiguration:
| MODE0 | MODE1 | MODE2 | Microstep Resolution |
|---|---|---|---|
| Low | Low | Low | Full step |
| High | Low | Low | Half step |
| Low | High | Low | 1/4 step |
| High | High | Low | 1/8 step |
| Low | Low | High | 1/16 step |
| High | Low | High | 1/32 step |
| Low | High | High | 1/32 step |
| High | High | High | 1/32 step |

FYS TB67S109 Stepper Driver Konfiguration:
| MS1 | MS2 | MS3 | Microstep Resolution |
|---|---|---|---|
| Low | Low | Low | Standby |
| Low | Low | High | Full step |
| Low | High | Low | Half step A |
| Low | High | High | 1/4 step |
| High | Low | Low | Half step B |
| High | Low | High | 1/8 step |
| High | High | Low | 1/16 step |
| High | High | High | 1/32 step |

ACHTUNG: Bitte immer darauf achten, dass für eine „geclonte“ Achse gleiche Treiber-Bausteine und gleiches Microstepping eingestellt wird wie auf der original Achse. (Das ist bei der doppelten Y-Achse der Fall)
ACHTUNG: Die Position der Microstepping Jumper ist beim GRBL Shield 2.00 gegenüber der Version 1.00 und 1.01 gespiegelt und anders benannt.
M0 beim 1.00 und 1.01 entspricht M1 beim 2.0
M1 beim 1.00 und 1.01 entspricht M2 beim 2.0
M2 beim 1.00 und 1.01 entspricht M3 beim 2.0
Beim GRBL Shield 1.00 und 1.01 ist M0 links, M1 mittig und M2 rechts.
Beim GRBL Shield 2.0 ist M1 rechts, M2 mittig und M3 links.
Treiber und Motor Inbetriebnahme
Als nächstes werden, jeweils im ausgeschalteten Zustand, einzeln die Treiberbausteine in Betrieb genommen. Das vorher genannte Prozedere sollte jeweils durchgeführt werden, bis ein Fehler auftritt. Dann ist der als letztes zugefügte Treiberbaustein ev. defekt.
- USB und 24V abschalten/stecken,
- Treiber in X-Sockel stecken
- USB anstecken, GRBL Startmeldung muss erscheinen
- USB abstecken
- Motor an X anschliessen
- 24V anschliessen und schalten, USB stecken
- Startmeldung „Grbl 1.1f [‚$‘ for help]“ muss erscheinen
- Befehl „G1 F500 X+10“ eingeben und per Enter Taste abschicken
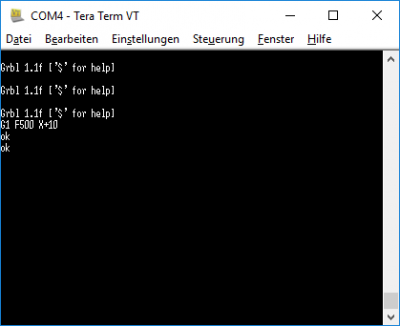

OK muss erscheinen und X-Motor sollte drehen!
- USB und 24V abschalten/stecken,
- Treiber in Y-Sockel stecken
- USB anstecken, GRBL Startmeldung muss erscheinen
- USB abstecken
- Motor an Y anschliessen
- 24V anschliessen und schalten, USB stecken
- Startmeldung „Grbl 1.1f [‚$‘ for help]“ muss erscheinen
- Befehl „G1 F500 Y+10“ eingeben und per Enter Taste abschicken
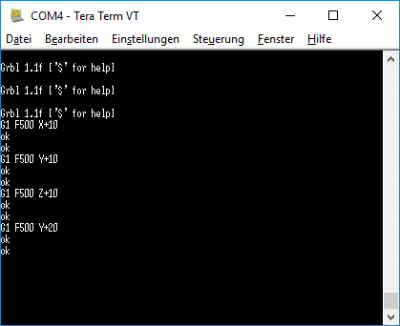

OK muss erscheinen und Y-Motor sollte drehen!
- USB und 24V abschalten/stecken,
- Treiber in Z-Sockel stecken
- USB anstecken, GRBL Startmeldung muss erscheinen
- USB abstecken
- Motor an Z anschliessen
- 24V anschliessen und schalten, USB stecken
- Startmeldung „Grbl 1.1f [‚$‘ for help]“ muss erscheinen
- Befehl „G1 F500 Z+10“ eingeben und per Enter Taste abschicken
OK muss erscheinen und Z-Motor sollte drehen!
- USB und 24V abschalten/stecken,
- Treiber in E-Sockel stecken
- USB anstecken, GRBL Startmeldung muss erscheinen
- USB abstecken
- Motor an E anschliessen
- 24V anschliessen und schalten, USB stecken
- Startmeldung „Grbl 1.1f [‚$‘ for help]“ muss erscheinen
- Befehl „G1 F500 Y+20“ eingeben und per Enter Taste abschicken
OK muss erscheinen und 2. Y-Motor sollte drehen!
Wenn ein Motor dann nicht läuft, ist die Beschaltung der Motoren zu überprüfen. Die Farbreihenfolge ist immer schwarz/grün/rot/blau. Es darf nie rot oder blau neben schwarz liegen, oder schwarz oder grün neben blau liegen! ist die Richtig, ist der Motor selber zu überprüfen. Zwischen den Leitungen schwarz/grün ist ein niedriger Widerstand zu messen (wenige Ohm) und gegen die Farben rot und blau muss der Widerstand „unendlich“ hoch sein. Dasselbe gilt für die Paarung rot/blau. Untereinander niedriger Widerstand, gegen die Farben schwarz/grün unendlich! Ist das nicht so, dann hat der Motor einen Kurzschluss!
Einstellen der Stromstärke
DRV8825: Beim DRV8825 wird die Stromstärke erhöht, indem der kleine Trimmer auf dem Board im Uhrzeigersinn verstellt wird. Somit wird also der Strom gegen den Uhrzeigersinn verringert.
A4988: Beim A4988 ist es genauso!!!
Sie auch Motorströme einstellen
Fehlersuche
Wenn nicht alles auf Anhieb funktioniert, dann bitte den Fehler einkreisen. Als erstes nur das ARDUINO Board mit dem PC verbinden. Dann sollte der PC das Board erkennen und ihm einen COM-Port zuweisen. Ist das nicht geschehen, dann ist ev. noch nicht der richtige Treiber installiert (8-bit Microcontroller Boards). Wird der COM-Port auch dann nicht zugewiesen, und auch die Leuchtdioden auf dem Arduino reagieren nicht, dann ist der USB-Baustein auf dem Board zerstört worden. Der Arduino muss ersetzt werden.