Ich hatte gestern noch eine Idee, wie man das mit dem Gurtspanner besser lösen kann: Wenn man die Zahnriemen etwas länger bestellt, kann man mittels eines Winkels mit 9x3.75mm Schlitz auf der einen und 5mm Langloch auf der anderen Seite die Spannvorrichtung an die Stirnseite der Achsen verlegen:
Da der Zahnriemen nicht so gut über die Kante läuft habe ich überlegt einen halben Alurundstab unterhalb des Schlitzes anzukleben:
Längere Zahnriemen sind bestellt, bin gespannt ob das so gut funktioniert wie ich mir das vorstelle..
Das Problem mit der Laufrollenkollision der X- und Y- Achse bei Montage mit außenliegenden Motoren habe ich mittels eines 20x20 Aluvierkantprofiles gelöst. Dieses lässt sich durch ein Loch in der Motorplatte anschrauben:
Auf der anderen Seite klebe ich ein 15x15mm Aluvierkantprofil an, um einen passenden Anschlag für den Endschalter zu bekommen:
Hier kann man auch meine modifizierte Spanneinrichtung für den Zahnriemen sehen. An den anderen Achsen sieht es nun so aus:
Die Lösung funktioniert zu meiner vollen Zufriedenheit und gewährt freie Fahrt über die komplette Achse. Für diese Lösung werden ca. 2cm längere Zahnriemen (also Achslänge +17cm) benötigt. Für die komplette Fräse also (3x17=51cm mehr bestellen)
Den Z-Endschalter habe ich mittels 2er M3 Bohrungen direkt in die Plastikplatte so montiert:
Für den unteren Anschlag habe ich aktuell noch keinen Endschalter.
Damit ist der mechanische Aufbau erstmal soweit durch und es ging an die Elektrik. Das Zusammensuchen der benötigten Informationen war ziemlich mühselig. Zunächst habe ich die Steckrichtung der Motortreiber in der Beschreibung der Fehlersuche auf dem GRBL Shield gefunden:
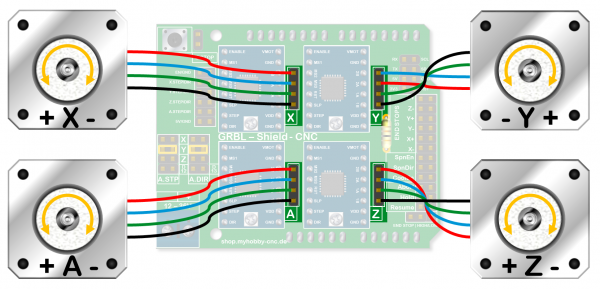
Die Motorverkabelung fand ich ebenfalls im Wiki zur Shapeoko2:
Hier ist zu beachten, daß bei Montage der Motoren aussenliegend die Fahrrichtung der Y-Achse andersherum ist als bei Montage Innenliegend.
Wenn man den A-Treiber auf der Y-Achse die durch den Koordinatenursprung läuft verkabelt, sollte es wie dargestellt passen. In jedem Fall ist es eine gute Idee die Motorverbingung steckbar zu machen, man erspart sich dadurch etliche Lötarbeiten
Zunächst machten die Motoren einen ziemlichen Lärm, bis ich die Info's zur Einstellung der Treiberleistung fand. Die Vorgehensweise den Einstellschraubendreher per Krokoklemme mit dem Messgerät zu verbinden und die Spannung am Abgriff des Potis so direkt bei der Einstellung zu messen erwies sich als perfekt.
Ich habe das Kit mit NEMA23 Motoren bestellt und bekam die Motorversion 57BYGH218 mit 2A Leistung geliefert. Bei ziemlich genau 1V am Abgriff wurden die Motoren leise, so daß die Beschreibung 1V Abgriffsspannung = 2A Treiberleistung offenbar zutrifft.
Die Kühlkörper werden ziemlich heiss, so daß ich einen 12V Lüfter aus dem Bestand verbaut habe. Diesen speise ich aus dem 24V Netzteil mit dem ich auch das GRBL-Shield versorge. Ein 2940S-12 Festspannungsregler erzeugt die benötigten 12V für den Lüfter. Dieser wird somit dabei am Limit der maximalen Eingangsspannung betrieben, und wäre für eine 36V Versorgung des GRBL-Shields nicht mehr geeignet!
Eine erste Fräsung war bereits erfolgreich, die 400W Brushless Chinaspindel läuft sehr leise. Aufgrund einer inkorrekten Annahme über die verwendete Einheit wurde der Demokreis mit 0.1 inches statt 0.1cm unerwartet tief gefräst, was allerdings dem Fräser in weichem Holz keine Probleme bereitete. Puh!
Als nächstes möchte ich die Temperatur der Motortreiber messen und denke darüber nach hier ggf. noch deutlich größere Kühlkörper als die mitgelieferten zu verwenden.
Der Sound der während der Kreisfräsung entstand, klang in meinen Ohren auch noch nicht richtig gut, aber der Kreis war immerhin rund und masshaltig.
Die Endschalter habe ich noch nicht aktiviert, da mir noch nicht klar ist, wie das idealerweise zu verschalten ist. Da + und - Anschluss auf dem GRBS Shield nicht getrennt sind, macht es keinen Sinn das Kabel doppelt zum Schalter zu führen. Ich habe daher beide Schalter für + und - Anschlag jeweils direkt am Laufwagen parallel angeschlossen und von dort ein Kabelpaar zum Shield geführt. Die Schalter habe ich so angelötet, daß der Kontakt im Falle eines Anschlags geschlossen wird.
Offene Fragen:
Muss der Endschalter auf Pullup oder GND gejumpert werden wenn die Schalter bei Anschlag schliessen?
Auf meinem Arduino Ist GRBL 0.8 installiert. Sollte das upgedated werden?
Auf der XLoader Download Seite steht zu lesen daß die aktuelle Version offenbar einen Virus enthält. Wo bekommt man eine unverseuchte Kopie?
Die gelieferten Kabel zu den Motoren und Enschaltern sind ungeschirmt. Ist da mit EMV Problemem zu rechen wie es im Forum dikutiert wird?
zwecks Temperaturmessung habe ich mitlerweile auf einige dht1820 Sensoren zurückgegriffen und einen Raspberry Pi mit rrdtool zur Speicherung der Daten. Das klappt soweit ganz gut und man könnte es noch beliebig erweitern.
Mir würden noch 100 Dinge einfallen die ich gerne mit überwachen würde, aber derzeit fehlt es an der Zeit: - Schwellwerte bei Überschreiten Alarm - Bei mehr als 2° Pro Minute und mehr als 60° -- Feueralarm ;) - Bewegungs-Überwachung usw... ;)
crix:Hier ist zu beachten, daß bei Montage der Motoren aussenliegend die Fahrrichtung der Y-Achse andersherum ist als bei Montage Innenliegend.
ist eigentlich egal da man es Softwareseitig einstellen kann in welche Richtung die Motoren drehen sollen (Grbl Settings) ;-)
crix:Ich habe das Kit mit NEMA23 Motoren bestellt und bekam die Motorversion 57BYGH218 mit 2A Leistung geliefert. Bei ziemlich genau 1V am Abgriff wurden die Motoren leise, so daß die Beschreibung 1V Abgriffsspannung = 2A Treiberleistung offenbar zutrifft.
Die Kühlkörper werden ziemlich heiss, so daß ich einen 12V Lüfter aus dem Bestand verbaut habe.
Normalerweiße bleibt man etwas drunter damit es nicht zu hitzeproblemen kommt. Bei mir habe ich ähnliche Schrittmotoren verbaut (2A) und die Potis auf 0,85V eingestellt. Die Fräse läuft Stundenlang ohne Lüfter und es wird nix heiß! Kraft ist auch ausreichend vorhanden. Im Sommer kommt aber sicherheitshalber noch ein Lüfter drauf.
Ich habe jetzt auf GRBL 0.9j upgedated und die Motortreiber auf 0.85V eingestellt.
Die Fahrtrichtung auf Y und Z hat nach dem Update nicht mehr gepasst, das ließ sich mit den Dir Invert Bits aber tatsächlich leicht korrigieren.
Die Endschalter funktionieren anscheinend, nachdem ich im Wiki den Hinweis fand daß für NO Schalter (Normal Open) der Jumper auf GND zu setzen ist.
Beim GRBL Controller passen die Settings in der Anwndung nicht mehr zur Firmware 0.9j das gibt dann Fehlermeldungen bei dem Versuch das über das Menü einzustellen.
Die Motortreiber werden unverändert sehr schnell ziemlich heiß. (So daß es beim Anfassen der Kühlkörper schon anfängt wehzutun.) Sobald ich die Stromversorgung für die Stepper einschalte höre ich auch ein ziemlich hochfrequentes Zwitschern. Wenn ich dann die Fräse verfahre wird es nach dem stoppen manchmal besser, manchmal lauter...
crix:Ich habe mir gerade nochmal auf Ronalds Hinweis hin meine Gantry angeschaut.
"Übrigens, beim Shapeoko-X und -MAX besteht die Möglichkeit, bei den Rahmenplatten eine tiefere Lochreihe zu nutzen. Dadurch kommt das ganze System jeweils 2cm tiefer!"
Ich habe den Eindruck dass die Bleche im Vergleich zur -X bei der Max um 90° gedreht sind. Ich kann die Gantry um 2cm nach hinten, aber nicht nach unten setzen. Habe ich da was falsch zusammengebaut?
Moderator: Bitte richtig lesen "Rahmenbleche", nicht die Motorplatten!!! Die sind nur nach vorne oder hinten zu verschieben!
Das Lesen war nicht das Problem. Dem Neuling ist nicht direkt klar daß die Motorplatte keine Rahmenplatte ist Da das nun klar ist (Die Erwähnung der Motorplatte im selben Kontext hilft da ungemein) habe ich mir auch das nochmal angeschaut:
Der Abstand zwischen Unterkante Motorplatte und Opferbrett (16mm stark) beträgt bei Nutzung der oberen Montagemöglichkeit 8mm. Mann kann die untere Lochreihe nutzen und das Profil 2cm tiefer montieren, muss dann die Opferplatte aber an beiden Seiten kürzen Um Platz für die Laufrollen zu schaffen. Alternativ kann die Opferplatte in 4mm Stärke dimensioniert werden, dann passt es so gerade eben noch.
ich nutze die Pololus A4988 und heiß wird nix. Ob die Pololus DRV8825 sich normal verhalten kann ich nicht beurteilen. Das "Zwitschern" höhrt sich aber nicht normal an. Der Hersteller schreibt folgendes dazu:
Zitieren:This product can get hot enough to burn you long before the chip overheats. Take care when handling this product and other components connected to it.
Ich hatte offenbar falsche GRBL Parameter. Nachdem ich $0 (step pulse, usec) von 30 auf 10 sowie $1 (step idle delay, msec) von 255 auf 25 geändert habe ist die Fräse schön leise und es zwitschert nix mehr. Die Motortreiber bleiben auch deutlich kühler.
Ich habe nun meine ShapeOko-MAX, grbl 0.9j, DRV8825 bei 0.85V Abgleichspannung (1.7A), NEMA23 57BYGH218 (2.0A rated current) mit folgenden Parametern am laufen:
ACHTUNG! Für meine Zahnriemenspannlösung werden +8cm, nicht wie oben angegeben +2cm benötigt! Also je Achse 23cm mehr Zahnriemen zusätzlich zur Achslänge.
Auf dem PC fand EASEL offenbar den Arduino nicht. Die neue Automatische COM Port Erkennung ist wohl nicht in allen Fällen ein Segen
$1 habe ich inzwischen wieder auf 255 gesetzt, nachdem ich mir die Beschreibung zu dem Parameter durchgelesen habe und das bei Zahnriemenbasierten Maschinen doch sehr sinnvoll erscheint die Motoren Zwecks Einhaltung der Position auch im Stillstand zu bestromen Natürlich werden die Treiber jetzt auch wieder im Stand heiss. Aber es scheint OK zu sein. IR Thermometer wird morgen geliefert, dann wird mal nachgemessen.
Das erste Frässtück ist gar nicht mal so übel geworden, mir ist allerdings aufgefallen dass die Y-Achse (bei mir die beidseitig angetriebene) irgendwie ruckelt. Man kann das auch im Frässtück an der entsrechenden Kante (kleiner Winkel zur Y-Achse) in Form einer Welle sehen:
Ich habe den Eindruck dass es nicht von der Spindel ausgeht, sondern eher vom Antrieb, konnte das aber bisher noch nicht festnageln. Hat da jemand der Mitfrickler einen Tipp für mich?
Hier auch noch ein kleines Video vom Fräsvorgang, man hört auch dass die Y-Achse irgendwie anders klingt als X: https://youtu.be/U9xIn4bEAZY

 Anmelden
Anmelden







 Da das nun klar ist (Die Erwähnung der Motorplatte im selben Kontext hilft da ungemein) habe ich mir auch das nochmal angeschaut:
Da das nun klar ist (Die Erwähnung der Motorplatte im selben Kontext hilft da ungemein) habe ich mir auch das nochmal angeschaut:
